MuDDI Project Webpage




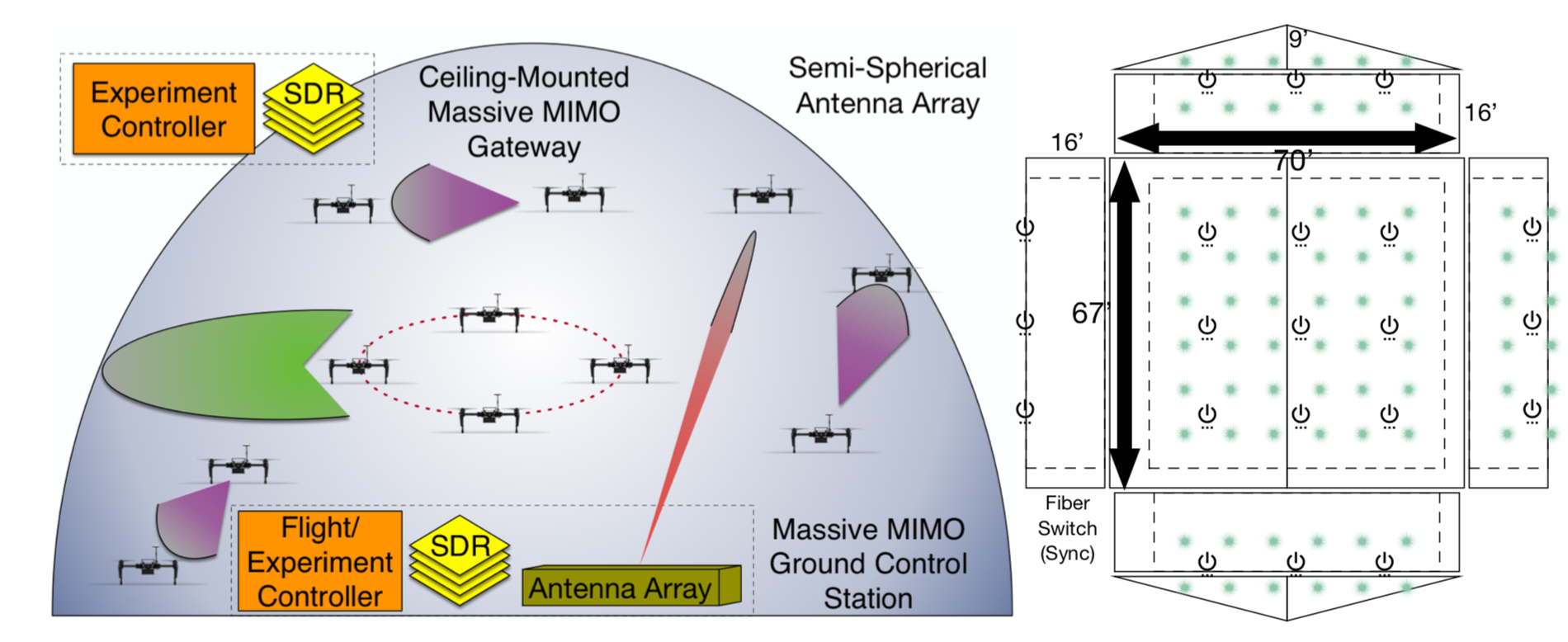


The next wave of applications for Unmanned Aerial Vehicles (UAVs) or drones range from delivery of consumer goods or Internet connectivity during natural disasters to defense scenarios such as autonomous combat or search and rescue, all of which require coordination of multiple entities across various altitudes from in-flight to ground-based stations. However, there are two important challenges to realizing such applications. First, positioning many antennas to communicate in three dimensions is non-trivial since the load capacity in terms of power and weight is highly restricted, and the drone body may block reception on the opposite side of the antenna. Second, large-scale antenna arrays are increasingly being used to increase channel quality in a given direction. However, there is limited antenna scale on a single UAV, and the challenge of distributing the antenna array across a drone swarm is extremely complex due to constant mobility, varying relative positions, and the inability to update the channel state of all transmitting nodes. In this project, the goal is to build MuDDI, a Multi-Dimensional Drone Communication Infrastructure, which will enable indoor and outdoor experimentation with UAVs to address research issues related to 3-D connectivity, distributed antennas across a drone swarm, and 3-D swarm formations that optimize the transmission to intended receivers.
Multi-Dimensional Drone Communications Infrastructure (MuDDI)
This material is based upon work supported by the National Science Foundation under Grant No. 1823304. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
